
Picture taken by MEGA
Hi, I am Yuexuan Li! You can also call me Kiara.
Currently working at Humanoid Robot Co., Ltd based in Shanghai. I graduated last year with a master’s degree from Columbia University. Right now, my research focuses on imitation learning. I’ve always been super passionate about robotics and love being part of this innovative field!
Projects
In this project, I explored the Visual Affordance method for visual robotic pack-and-place tasks. I implemented and trained a Visual Affordance model with manually labeled data and used rotated heightmaps, domain randomization, and self-supervision to improve the model's performance. We aimed to improve the model's grasp success rate on unseen novel objects.
During this project, I applied Solidworks and Python to design and create a legged robot, covering conceptual design, detailed design, simulation and modeling, digital manufacturing, electronics, and sensor design. I used a 3D printer to print the body of my robot and optimized the gait in simulation and reality by Python.
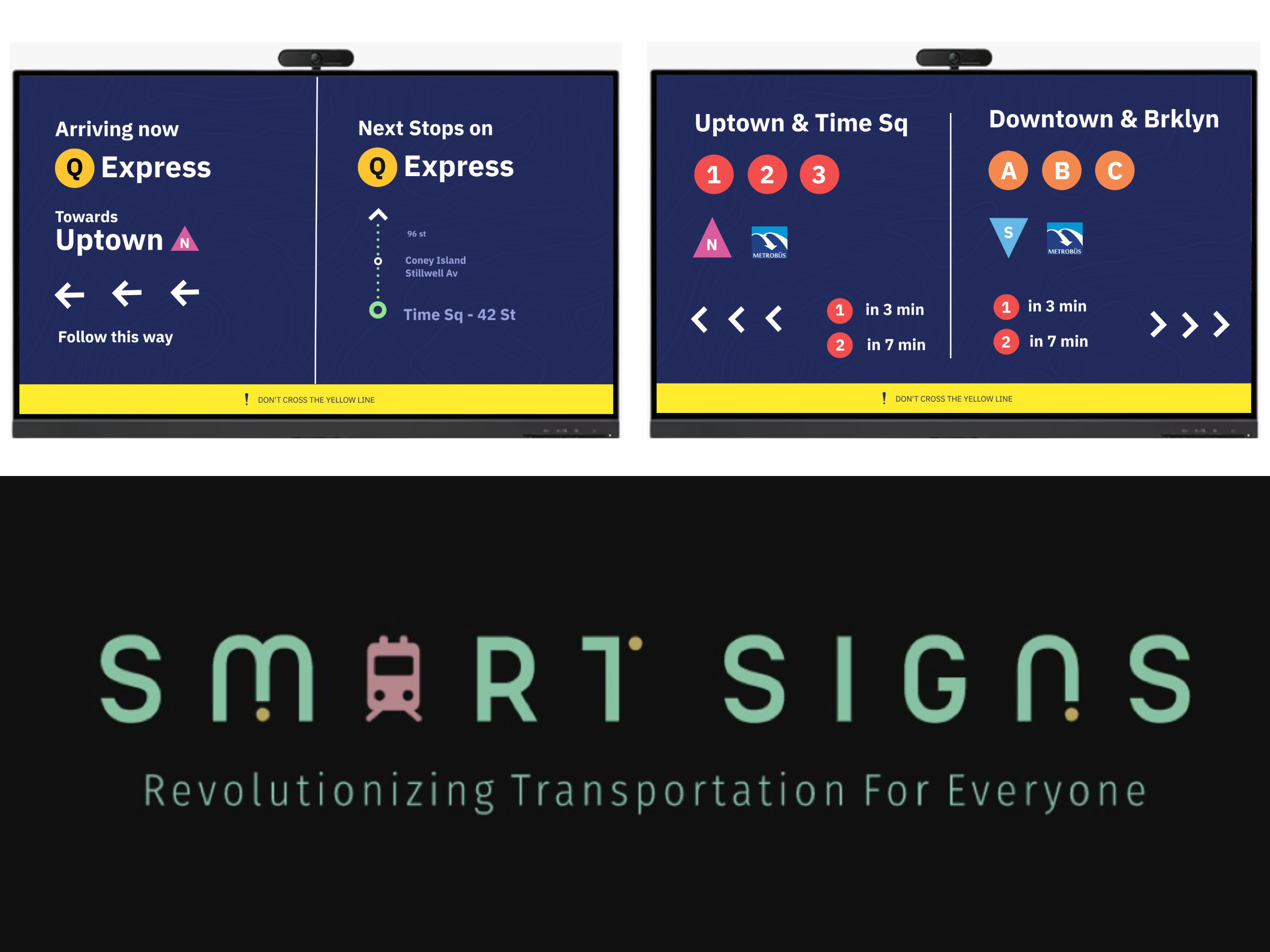 Design Project — Smart Signs
Design Project — Smart Signs
Smart Signs is an exciting project that addresses a common frustration for commuters - the uncertainty of public transportation. Our team has developed a solution that replaces static subway signs with dynamic Smart Screens that can be remotely updated in real-time to reflect track maintenance and delays.
Our team's project is an excellent example of the power of design thinking and collaboration. We identified an emerging human need and utilized new technology to create a product that addresses that need. We are proud to have made a solution that has the potential to improve the daily commute for countless individuals.
Experience
- Mar 2024 ~ Humanoid Robot Co., Ltd
Algorithm Engineer
• Keywords: Python, Imitation Learning, Simulation Environment
- Jul 2021 - Aug 2021 China Tower Corporation Limited
Internship
• Keywords: ANSYS, SolidWorks, Stress Analysis
Education
- 2022 - 2024 Columbia University
MS Mechanical Engineering
• Keywords: Robot, Artificial Intelligence
- 2018 - 2022 Dalian University of Technology
BE Engineering Mechanics
• Keywords: Dynamics, Finite Element Analysis
Talks
-

- 2025-9-21 Automobile Innovation Port Conference Center, Shanghai
Overview of Robot Simulation Platforms & Practical Analysis of Isaac Lab
• Invited guest speaker
Activity
- Sep 2020 - Jun 2021 Dalian University of Technology Overseas Exchange Association
Director of Research Department
• Led department members to conduct an investigation into development of domestic and foreign societies
- Sep 2019 - Jun 2020 Dalian University of Technology Students' Union
Vice Director of Rights and Interests Department
• Organized a wide range of activities on campus to provide students a platform to demonstrate personal abilities
• Led a team of 15 volunteers to edit and launch 14 issues of equity publications and 7 issues of equity popularization tweets, and received 40K+ viewership on WeChat
- Sep 2018 - Jun 2019 Dalian University of Technology Students' Union
Student Officer of Liaison Department